Hullectronics
Current Status
For those who are unfamiliar with the structure of MIT Arcturus, we split up into subteams to complete tasks and work on our competition boat in an efficient manner. One of such subteams solely focuses on the boat itself and in doing so, plays an integral role in creating a foundational structure to support the work being done by the other subteams. As the primary focus of this team is the hardware of the vessel itself, like the hull and the integrated electronics that allow it to function, we have merged these two elements into the wonderful field of engineering known to us as Hullectronics.
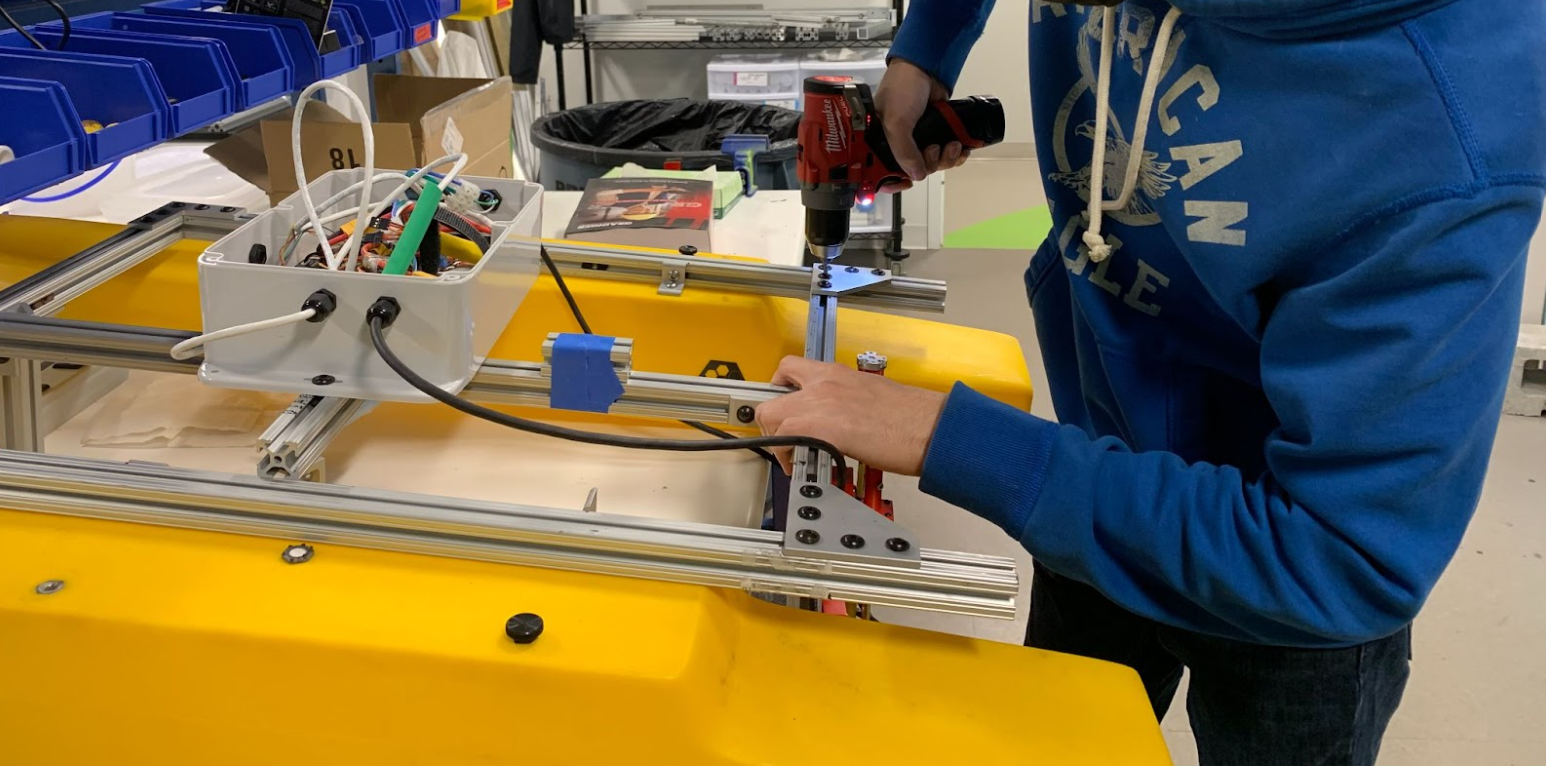
So far, we have fully assembled the frame of our test boat (coined CatamaROV) and are starting to install azimuthal thrusters, which we usually will call azipods. The design of this thruster implementation has been an entire subteam effort. We have each been taking on separate tasks as well as one component of the azipod design, which we hope to test ASAP on CatamaROV.
Val and Sebastian have been working through the kinks on our azipod-to-hull mount this week among other things. While doing that, Val has been looking ahead and ordering parts we will soon be needing to finalize CatamaROV and Sebastian has been preparing our waterproof “dry boxes” which house all of the electronics for the boat. Penelope finished fabricating the bearing attachments for the azipods, which are responsible for transferring all the thrust from the azipod to the boat itself. Meanwhile, Ansel finished mapping all of the controls with the Ardupilot and wired up all the components in the dry boxes that Sebastian helped to solder.
Next Steps
With most of CatamaROV coming together, we have to coordinate with our Navigations subteam to determine a testing schedule so that we can test some of the experimental elements of our design while also making sure they have the most useful testing platform possible so that we can start focusing on the design and fabrication of our final boat.

Hullectronics
Recent Developments
We just completed our first field test with CatamaROV this week! This was one of the first times we were able to get it out on the water to test its speed and maneuverability. Testing in our two tanks are great for some aspects, but out on the Charles we confirmed that our three azipod layout would indeed give us the flexibility we need to make complex maneuvers like tight turns at both low and high speeds. We also confirmed what we already knew about our preliminary azipod design, that we are going to need to i crease its supporting substructure for our scaled up final hull. Overall, the tests were a success!
Next Steps
Moving forward, we can start applying what we verified in our testing to the design of the final hull. Time permitting (on both the Hullectronics and Navigations side of things), we will fabricate and install three azipods into our final hull after a redesign to compensate for our larger final vessel. We already have some ideas for the new azipod design and after some conversations between subteams (and some calculations we ran around buoyancy to ensure we can reuse this boat for future projects) we have decided fully on a catamaran structure going forward.
Hullectronics
Current Status
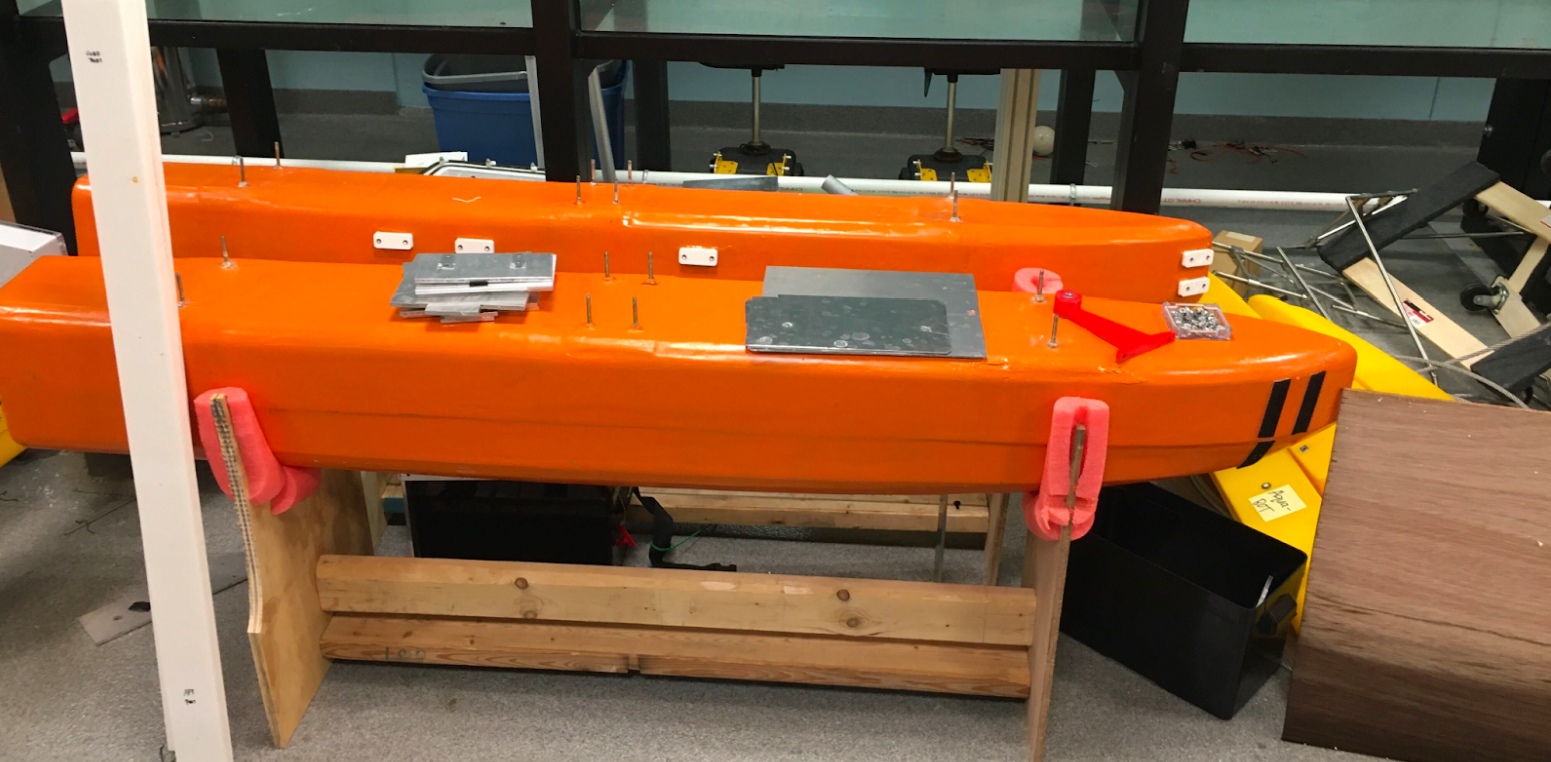
After successful trials with our test boat (CatamaROV), we are finalizing our designs and are looking to fabricate our final hull. With sustainability in mind, we will try and repurpose a foam-fiberglass hull that we had built previously to meet our design specifications.
Recent Developments
Our new catamaran hulls have been cut down to size and are now in the process of getting the epoxy and fiberglass lay-up done. Sebastian and Yasin have been working on the aluminum frame of the boat that will hold the two hulls together and Ansel has been procuring materials for the deck that will hold all of the electronics on the vessel.
Jessica is working on adapting our azimuth thruster design to these new catamaran hulls. Adding several layers of structural support to these thruster elements will ensure this vital component is as secure as possible without sacrificing functionality. While the azipod thrusters will take some time to finish, it is imperative that we complete the hull and deck fabrication in a timely manner to allow our Navigations subteam the necessary time to mount the sensor suite for calibration.
Goals and Timeline
After finalizing our azipod thrusters and finishing the hull retrofit, we will start to look at finishing the fabrication of the deck between our hulls at the start of next week. We will be modifying this bridge heavily in the coming weeks as we go in order to suit the specific challenges of this competition and provide a strong structural foundation for the Navigations and Task Force subteams' components.